惯性导航-imu 的原理与应用
原理简述
惯性导航-IMU 的核心原理基于牛顿运动定律。它主要由加速度计和陀螺仪组成。加速度计用于测量物体的加速度,而陀螺仪则能感知物体的旋转角速度。通过不断采集这些数据并进行积分等运算,可以确定物体的位置、速度和姿态等信息。
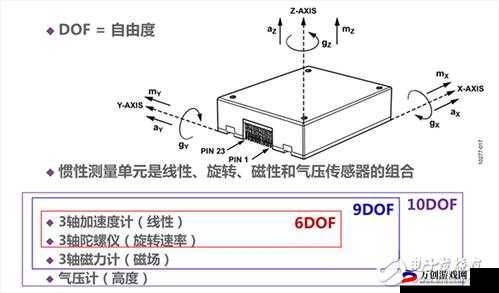
加速度计的工作原理是基于惯性质量在加速度作用下的位移变化。它能够精确地测量出沿各个轴的加速度分量。而陀螺仪则利用了角动量守恒的原理,通过检测旋转轴上的惯性变化来确定角速度。这两者相互配合,为惯性导航提供了关键的数据基础。
广泛应用
在航空航天领域,惯性导航-IMU 是不可或缺的技术。它为飞行器提供精确的导航信息,确保飞行的安全与准确。在卫星导航信号受到干扰或不可用时,IMU 能够独立工作,保障飞行任务的顺利进行。
在自动驾驶领域,IMU 同样发挥着重要作用。它与其他传感器结合,实时感知车辆的姿态和运动状态,为自动驾驶系统提供准确的参考,帮助车辆在复杂的路况下做出正确的决策和控制。
在机器人领域,IMU 有助于机器人实现精确的定位和运动控制。无论是工业机器人还是服务机器人,都依赖于它来实现高效的作业和交互。
技术挑战
惯性导航-IMU 也面临着一些技术挑战。例如,随着时间的推移,测量误差会逐渐累积,影响导航精度。为了解决这个问题,需要采用多种技术手段来进行误差补偿和修正。
环境因素如温度、振动等也会对 IMU 的性能产生影响。如何提高其在恶劣环境下的稳定性和可靠性也是研究的重点之一。
未来展望
随着技术的不断进步,惯性导航-IMU 将朝着更高精度、更小体积、更低成本的方向发展。新的材料和制造工艺将被应用,以提升其性能。
未来,它可能会与更多的新兴技术融合,如人工智能、量子技术等,为各个领域带来更强大的应用能力和创新空间。
惯性导航-IMU 作为一项关键技术,在众多领域有着广泛的应用和重要的地位。尽管面临一些挑战,但通过不断的研究和创新,它将在未来发挥更大的作用,为我们的生活和科技发展带来更多的便利和突破。我们应持续关注其发展动态,积极探索其潜在的应用场景和可能性。
相关资讯
-

-
-

-
-

Ysl 千人千色 T9T9T9MBA 是哪个色号:探索其神秘色彩
以下是关于“Ysl 千人千色 T9T9T9MBA 是哪个色号:探索其神秘色彩”的内容: 在美妆的世界里,YSL(圣罗兰)一直以其... -

-

-
